DepthAI FAQs & How-To
Why Does DepthAI Exist?
In trying to solve an Embedded Spatial AI problem (details here), we discovered that there were no tools to do so. The perfect chip existed (which is great), but there was no platform (hardware, firmware, or software) which allowed the chip to be used to solve such an Embedded Spatial AI problem.
So we built the platform.
What is DepthAI?
DepthAI is the Embedded Spatial AI platform, composted of an open-source hardware, firmware, software ecosystem that provides turnkey embedded Spatial AI and hardware-accelerated computer vision.
It gives embedded systems the super-power of human-like perception in real-time: what an object is and where it is in physical space.
It can be used with off-the-shelf AI models (how-to here) or with custom models using our completely-free training flow (how-to here).
An example of a custom-trained model is below, where DepthAI is used by a robot to autonomously pick and sort strawberries by ripeness.
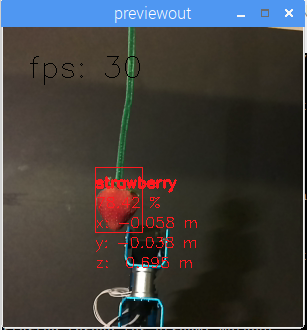
It was trained to do so over the course of a weekend, by a student (for a student project), using our free online training resources.
DepthAI is also open-source (including hardware). This is done so that companies (and even individuals) can prototype and productize solutions quickly, autonomously, and at low risk.
See the summary of our (MIT-Licensed) Githubs below, which include open-source hardware, firmware, software, and machine-learning training.
What is SpatialAI? What is 3D Object Localization?
First, it is necessary to define what ‘Object Detection’ is:

It is the technical term for finding the bounding box of an object of interest, in pixel space (i.e. pixel coordinates), in an image.
3D Object Localization, is all about finding such objects in physical space, instead of pixel space. This is useful when trying to real-time measure or interact with the physical world.
Below is a visualization to showcase the difference between Object Detection and 3D Object Localization:

(Click on the imageabove to pull up the YouTube video.)
Spatial AI is then the super-set of such 2D-equivalent neural networks being extended with spatial information to give them 3D context. So in other words, it’s not limited to object detectors being extended to 3D object localizers. Other network types can be extended as well, including any network which returns results in pixel space.
An example of such an extension is using a facial landmark detector on DepthAI. With a normal camera this network returns the 2D coordinates of all 45 facial landmarks (countours of eyes, ears, mouth, eybrows, etc.) Using this same network with DepthAI, each of these 45 facial landmarks is now a 3D point in physical space instead of 2D points in pixel space.
What is megaAI?
The monocular (single-camera) version of DepthAI is megaAI. Because not all solutions to embedded AI/CV problems require spatial information.
We named it mega because it’s tiny:

megaAI uses all the same hardware, firmware, software, and training stacks as DepthAI (and uses the same DepthAI Githubs), it is simply the tiny single-camera variant.
You can buy megaAI from our distributors and also our online store here.
How hard is it to get DepthAI running from scratch? What Platforms are Supported?
Not hard. Usually DepthAI is up/running on your platform within a couple minutes (most of which is download time).
The requirements are Python and OpenCV (which are great to have on your system anyway!). see here for supported platforms and how to get up/running with them.
Raspbian, Ubuntu, macOS, Windows, and many others are supported and are easy to get up/running.
For Install on various platforms are here.
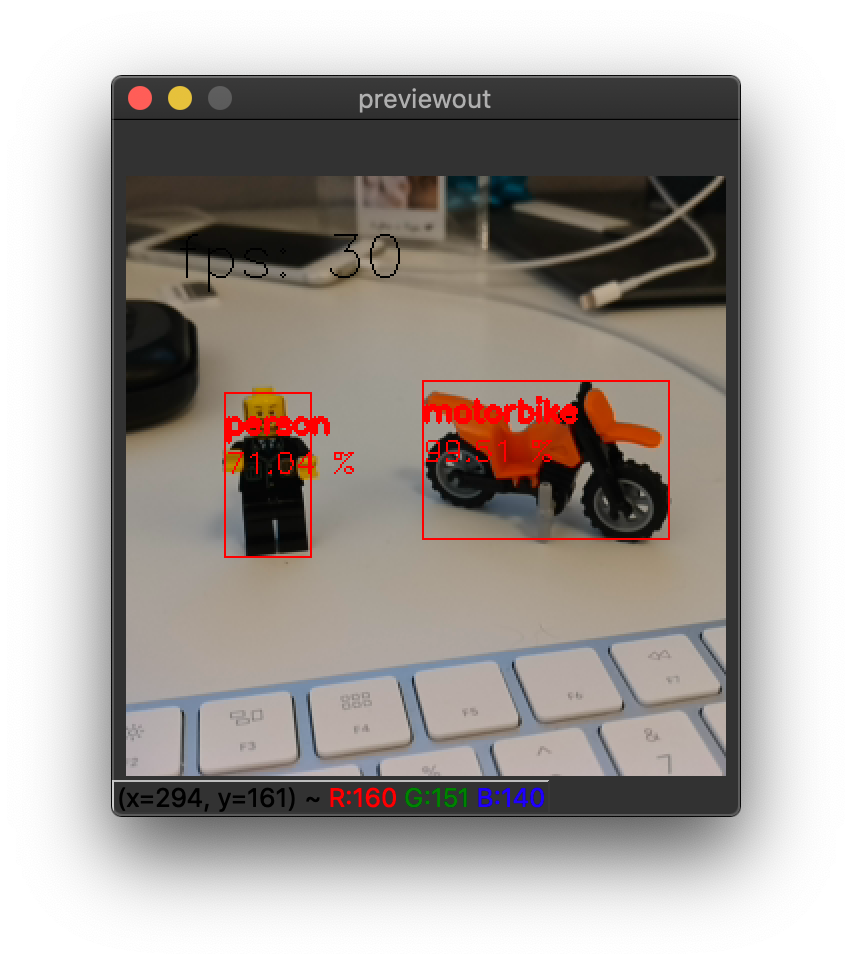
It’s a matter of minutes to be up and running with the power of Spatial AI, on the platform of your choice. Below is DepthAI running on my Mac.

(Click on the imageabove to pull up the YouTube video.)
The command to get the above output is python3 test.py -s metaout previewout depth_sipp -ff -bb.
Here is a single-camera version (megaAI) running with pytyon3 test.py -dd (to disable showing depth info):
Is DepthAI and megaAI easy to use with Raspberry Pi?
Very. It’s designed for ease of setup and use, and to keep the Pi CPU not-busy.
See here to get up and running quickly!
Can all the models be used with the Raspberry Pi?
Yes, every model can be used, including:
- Raspberry Pi Compute Module Edition (BW1097 - this one has a built-in Raspberry Pi Compute Module 3B+)
- Raspberry Pi HAT (BW1094) - this can also be used with other hosts as its interface is USB3
- USB3C with Onboard Cameras BW1098OBC
- USB3C with Modular Cameras BW1098FFC
- megaAI (microAI) Single Camera BW1093
We even have some basic ROS support going as well which can be used on the Pi also.
Can I use multiple DepthAI with one host?
Yes. DepthAI is architected to put as-little-as-possible burden on the host. So even with a Raspberry Pi you can run a handful of DepthAI with the Pi and not burden the Pi CPU.
See here for instructions on how to do so.
Can I train my own Models for DepthAI?
Yes.
We have a tutorial around Google Collab notebooks you can even use for this. See here
Do I need Depth data to train my own custom Model for DepthAI?
No.
That’s the beauty of DepthAI. It takes standard object detectors (2D, pixel space) and fuses these neural networks with stereo disparity depth to give you 3D results in physical space.
Now, could you train a model to take advantage of depth information? Yes, and it would likely be even more accurate than the 2D version. To do so, record all the streams (left, right, and color) and retrain on all of those (which would require modifying the front-end of say MobileNet-SSD to allow 5 layers instead of 3 (1 for each grayscale, 3 for the color R, G, B).
If I train my own network, which Neural Operations are supported by DepthAI?
See the VPU section here.
Anything that’s supported there uner VPU will work on DepthAI. It’s worth noting that we haven’t tested all of these
permutations though.
What network backbones are supported on DepthAI?
All the networks listed here are supported by DepthAI.
We haven’t tested all of them though. So if you have a problem, contact us and we’ll figure it out.
Are CAD Files Available?
Yes.
The full designs (including source Altium files) for all the carrier boards are in our depthai-hardware Github:
What are the Minimum and Maximum Depth Visible by DepthAI?
Depth data from DepthAI is returned in uint16 format. To interpret this depth into meters, use the following conversions.
In terms of numerically-limited max distance (i.e. not limited by the practicalities of physics), the actual furthest distance is
focal_length * base_line_dist in meters, *1000 in mm, where focal_length = frame_width [pixels] / (2 * tan(fov / 2 / 180 * pi));
Where frame_width is the horizontal resolution of the sensors, by default 1280 pixels.
The minimum distance for depth perception (in meters) is:
min_distance = focal_length * base_line_dist / 96
Where 96 is the standard maximum disparity search used by DepthAI.
For DepthAI, the HFOV of the the grayscale global shutter cameras is 71.86 degrees (this can be found on your board, see here, so the focal length is
focal_length = 1280/(2*tan(71.86/2/180*pi)) = 883.15 (calculation here).
(And for depth data, the value is stored in uint16, where the max value of uint16 of 65535 is a special value, meaning that that distance is unknown.)
Onboard Camera Minimum Depths
For DepthAI units with onboard cameras, this works out to the following minimum depths:
- DepthAI RPi Compute Module Edition (BW1097) the minimum depth is 0.827 meters:
min_distance = 883.15*.09/96 = 0.827m(calculation here) - USB3C Onboard Camera Edition (BW1098OBC) is 0.689 meters:
min_distance = 883.15*.075/96 = 0.689m(calculation here)
Modular Camera Minimum Depths:
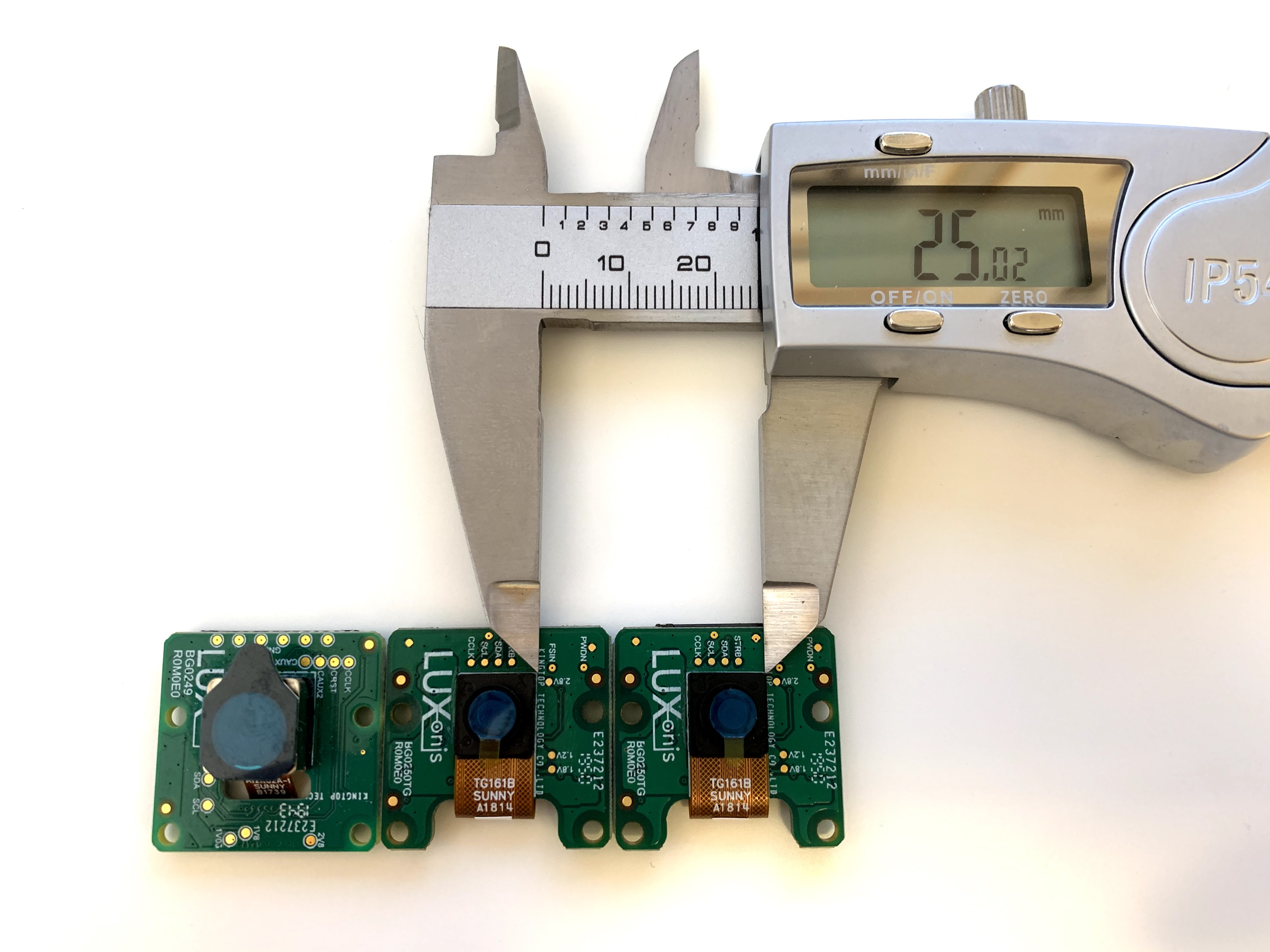
For DepthAI units which use modular cameras, the minimum baseline is 2.5cm (see image below) which means the minimum perceivable depth 0.229 meters (calculation here).
The minimum baseline is set simply by how close the two boards can be spaced before they physically interfere:
Extended Disparity:
If it is of interest in your application, we can implement a system called extended disparity which affords a closer minimum distance for the given baseline. This increases the maximum disparity search from 96 to 192. So this cuts the minimum perceivable distance in half (given that the minimum distance is now focal_length * base_line_dist / 192 instead of focal_length * base_line_dist / 96.)
- DepthAI RPi Compute Module Edition (BW1097): 0.414 meters
- USB3C Onboard Camera Edition (BW1098OBC) is 0.345 meters
- Modular Cameras at Mimumum Spacing (e.g. BW1098FFC) is 0.115 meters
So if you have the need for this shorter minimum distance, reach out to us on slack, email, or discuss.luxonis.com to let us know. It’s on our roadmap but we haven’t yet seen a need for it, so we haven’t prioritized implementing it (yet!).
How Do I Display Multiple Streams?
To specify which streams you would like displayed, use the -s option. For example for metadata (e.g. bounding box results from an object detector), the color stream (previewout), and for depth results (depth_sipp), use the following command:
python3 test.py -s metaout previewout depth_sipp
The available streams are:
metaout# Meta data results from the neural networkpreviewout# Small preview stream from the color cameraleft# Left grayscale camera (markedLorLEFTon the board)right# Right grayscale camera (markedRorRIGHTon the board)depth_sipp# Depth inuint16(see here for the format.disparity# Raw disparitydepth_color_h# Disparity colorized on the host (to give aJETcolorized visualization of depth)
How Do I Limit The FrameRate Per Stream?
So the simple way to select streams is to just use the -s option. But in some cases (say when you have a slow host or only USB2 connection -and- you want to display a lot of streams) it may be necessary to limit the framerate of streams to not overwhelm the host/USB2 with too much data.
So to set streams to a specific framerate to reduce the USB2 load and host load, simply specify the stream with -s streamname with a comma and FPS after the stream name like -s streamname,FPS.
So for limiting depth_color_h to 5 FPS, use the following command:
python3 test.py -s depth_color_h,5
And this works equally for multiple streams:
python3 test.py -s left,2 right,2 previewout depth_color_h,5
It’s worth noting that the framerate limiting works best for lower rates. So if you’re say trying to hit 25FPS, it’s best to just leave no frame-rate specified and let the system go to full 30FPS instead.
Specifying no limit will default to 30FPS.
One can also use the following over-ride command structure, which allows you to set the framerate per stream.
The following example sets the depth_sipp stream to 8 FPS and the previewout to 12 FPS:
python3 test.py -co '{"streams": [{"name": "depth_sipp", "max_fps": 8.0},{"name": "previewout", "max_fps": 12.0}]}'
You can pick/choose whatever streams you want, and their frame rate, but pasting in additional {"name": "streamname", "max_fps": FPS} into the expression above.
How do I Record Video with DepthAI?
DepthAI suppots h.264 and h.265 (HEVC) and JPEG encoding directly itself - without any host support. The depthai.py script shows and example of how to access this functionality.
To leverage this functionality from the command line, use the -v (or --video) command line argument as below:
python3 test.py -v [path/to/video.h264]
To then play the video in mp4/mkv format use the following muxing command:
ffmpeg -framerate 30 -i [path/to/video.h264] -c copy [outputfile.mp4/mkv]
By default there are keyframes every 1 second which resolve the previous issues with traversing the video as well as provide the capability to start recording anytime (worst case 1 second of video is lost if just missed the keyframe)
When running test.py, one can record a jpeg of the current frame by hitting c on the keyboard.
Video Encoding Options
Additional options can be configured in the video encoding system by adding a video_config section to the JSON config of the DepthAI pipeline builder, here, an example of which is here.
config = {
...
'video_config':
{
'rateCtrlMode': 'cbr', # Options: 'cbr' / 'vbr' (constant bit rate or variable bit rate)
'profile': 'h265_main', # Options: 'h264_baseline' / 'h264_main' / 'h264_high' / 'h265_main'
'bitrate': 8000000, # When using CBR
'maxBitrate': 8000000, # When using CBR
'keyframeFrequency': 30, # In number of frames
'numBFrames': 0,
'quality': 80 # (0 - 100%) When using VBR
}
...
}
The options above are all current options exposed for video encoding and not all must be set.
If video_config member is NOT present in config dictionary then default is used:
Default video encoder configuration: H264_HIGH, constant bitrate @ 8500Kbps, keyframe every 30 frames (once per second), num B frames: 0
How Do I Force USB2 Mode?
USB2 Communication may be desirable if you’d like to use extra-long USB cables and don’t need USB3 speeds.
To force USB2 mode, simply use the -fusb2 (or --force_usb2) command line option as below:
python3 test.py -fusb2
Note that if you would like to use DepthAI at distances that are even greater than what USB2 can handle, we do have DepthAI PoE variants coming, see here, which allow DepthAI to use up to a 328.1 foot (100 meter) cable for both data and power - at 1 gigabit per second (1gbps).
What Are The Stream Latencies?
When implementing robotic or mechatronic systems it is often quite useful to know how long it takes from a photo hitting an image sensor to when the results are available to a user, the photon-to-results latency.
So the following results are an approximation of this photon-to-results latency, and are likely an over-estimate as we tested by actually seeing when results were updated on a monitor, and the monitor itself has some latency, so the results below are likely an over-estimate, and are overestimated by whatever the latency of the monitor is that we used during the test. They give, however, a decent worst-case latency:
| measured | requested | avg latency, ms |
|---|---|---|
| left | left | 100 |
| left | left, right | 100 |
| left | left, right, depth_sipp | 100 |
| left | left, right, depth_sipp, metaout, previewout | 100 |
| previewout | previewout | 65 |
| previewout | metaout, previewout | 100 |
| previewout | left, right, depth_sipp, metaout, previewout | 100 |
| metaout | metaout | 300 |
| metaout | metaout, previewout | 300 |
| metaout | left, right, depth_sipp, metaout, previewout | 300 |
What Information is Stored on the DepthAI Boards
Initial Crowd Supply backers received boards which hat literally nothing stored on them. All information was loaded from the host to the board. This includes the BW1097 (here), which had the calibration stored on the included microSD card.
So each hardware model which has stereo cameras (e.g. BW1097, BW1098FFC, BW1098OBC, and BW1094) has the capability to store the calibration data and field-of-view, stereo basline (L-R distance) and relative location of the color camera to the stereo cameras (L-RGB distance) as well as camera orientation (L/R swapped). To retrieve this information, simply run python3 test.py and look for EEPROM data:. Example of information pulled from a BW1098OBC is below:
EEPROM data: valid (v2)
Board name : BW1098OBC
Board rev : R0M0E0
HFOV L/R : 71.86 deg
HFOV RGB : 68.7938 deg
L-R distance : 7.5 cm
L-RGB distance : 3.75 cm
L/R swapped : yes
L/R crop region: top
Calibration homography:
1.002324, -0.004016, -0.552212,
0.001249, 0.993829, -1.710247,
0.000008, -0.000010, 1.000000,
Current (as of April 2020) DepthAI boards with on-board stereo cameras (BW1097 and BW1098OBC ship calibration and board parameters pre-programmed into DepthAI’s onboard eeprom.
What is the Field of View of DepthAI and megaAI?
DepthAI and megaAI use the same 12MP RGB Camera module based on the IMX378.
- 12MP RGB Horizontal Field of View (HFOV): 68.7938 deg
- 1MP Global Shutter Grayscale Cmera Horizontal Field of View (HFOV): 71.86 deg
How do I Get H.264 Videos to Play on My Mac?
The h.264 videos which DepthAI and uAI encode do not work by default on Mac OS X. You can always upload them to Youtube/Google Photos/etc. and they’ll play their. BUT, if you want them to work directly on your Mac, you can do the following conversion using ffmpeg through HomeBrew:
Install ffmpeg
brew install ffmpeg
Make an ffmpeg Conversion Script
Make a new file called transcode_h264.sh and make it executable:
touch transcode_h264.sh
chmod +x transcode_h264.sh
Add the following commands to transcode_h264.sh:
ffmpeg -an -i "$1" -vf scale=-1:406 -vcodec libx264 -preset veryslow -crf 23 -maxrate 1200k -bufsize 2500k -pix_fmt yuv420p -profile:v baseline -level 3.1 -f mp4 /tmp/pass1 && \
ffmpeg -an -i "$1" -vf scale=-1:406 -vcodec libx264 -preset veryslow -crf 23 -maxrate 1200k -bufsize 2500k -pix_fmt yuv420p -profile:v baseline -level 3.1 -f mp4 -movflags +faststart -tune zerolatency "$1.mp4"
You can do this by copying the text above, and issuing the following commands with vim:
vim transcode_h264.sh
i
Hit CMD + v
Hit esc
:wq
Hit enter
Use the Conversion Script
./transcode_h264.sh myvid.mov
You’ll get a nice, fairly small, Mac-friendly and share-able video.
[Optional] Add the Conversion Script to Your Path
cp transcode_h264.sh /usr/local/bin/transcode_h264
Now you can juse use transcode_h264.sh in any directory!
What are the Highest Resolutions and Recording FPS Possible with DepthAI and megaAI?
megaAI can be used to stream raw/uncompressed video with USB3. Gen1 USB3 is capable of 5gbps and Gen2 USB3 is capable of 10gbps. DepthAI and megaAI are capable of both Gen1 and Gen2 USB3 - but not all USB3 hosts will support Gen2, so check your hosts specifications to see if Gen2 rates are possible.
| Resolution | USB3 Gen1 (5gbps) | USB3 Gen2 (10gbps) |
|---|---|---|
| 12MP (4056x3040) | 21.09fps (390MB/s) | 41.2fps (762MB/s) |
| 4K (3840x2160) | 30.01fps (373MB/s) | 60.0fps (746MB/s) |
DepthAI and megaAI can do h.264 and h.265 (HEVC) encoding on-device. The max resolution/rate is 4K at 30FPS. With the default encoding settings in DepthAI/megaAI, this brings the throughput down from 373MB/s (raw/unencoded 4K/30) to 3.125MB/s (h.265/HEVC at 25mbps bit rate). An example video encoded on DepthAI BW1097 (Raspberry Pi Compute Module Edition) is below:

It’s worth noting that all DepthAI and megaAI products share the same color camera specs and encoding capabilities. So footage filmed on a DepthAI unit with the color camera will be identical to that taken with a megaAI unit.
Encoded:
- 12MP (4056x3040) : JPEG Pictures/Stills
- 4K (3840x2160) : 30.00fps (3.125MB/s)
What Auto-Focus Modes Are Supported?
DepthAI and megaAI support continuous video autofocus (‘2’ below, where the system is constantly autonomously searching for the best focus) and also and auto mode (‘1’ below) which waits to focus until directed by the host. (PR which adds this functionality is here.)
Example usage is shown in depthai.py. When running python3 test.py (which symlink calls depthai.py) the functionality can be used by keyboard command while the program is running:
- ‘1’ to change autofocus mode to auto
- ‘f’ to trigger autofocus
- ‘2’ to change autofocus mode to continuous video
What is the Hyperfocal Distance of the Auto-Focus Color Camera?
The hyperfocal distance is important, as it’s the distance beyond which everything is in good focus. Some refer to this as ‘infinity focus’ colloquially.
The ‘hyperfocal distance’ (H) of DepthAI/megaAI’s color camera module is quite close because of it’s f.no and focal length.
From WIKIPEDIA, here, the hyperfocal distance is as follows:
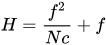
Where:
- f = 4.52mm (the ‘effective focal length’ of the camera module)
- N = 2.0 (+/- 5%, FWIW)
- c = C=0.00578mm (see here, someone spelling it out for the 1/2.3” format, which is the sensor format of the IMX378)
So H = (4.52mm)^2/(2.0 * 0.00578mm) + 4.52mm ~= 1,772mm, or 1.772 meters (5.8 feet).
We are using the effective focal length, and since we’re not optics experts, we’re not 100% sure if this is appropriate here, but the total height of the color module is 6.05mm, so using that as a worst-case focal length, this still puts the hyperfocal distance at 10.4 feet.
So what does this mean for your application?
Anything further than 10 feet away from DepthAI/megaAI will be in focus when the focus is set to 10 feet or beyond. In other words, as long as you don’t have something closer than 10 feet which the camera is trying to focus on, everything 10 feet or beyond will be in focus.
P.S.: And in terms of history of these sorts of modules, one of the reasons auto-focus was added to these cell phone cameras was to handle close-in focus scenarios (not far-out focus, as that was handled by the hyperfocal distance). In fact the first cell phone camera modules were all fixed-focus where the hope/goal was that the hyperfocal distance was close-in enough for most applications. On such case where that assumption wasn’t true was bar-code scanning. In fact Occipital started a business a bit over a decade ago specializing in doing the real-time deconvolutions necessary to allow these fixed-focused (and low-resolution) phones to scan barcodes (it was called ‘Red Laser’). The phones were really low resolution back then - and fixed focus - so there just weren’t enough pixels to make out the barcode when the camera were at the hyperfocal distance (or further), so the core tech of Occipital’s Red Laser was to do the image deconvolution necessary to read the barcode even though the resultant image was well out of focus.
Am I able to attached alternate lenses to the camera? What sort of mounting system? S mount? C mount?
The color camera on megaAI and DepthAI is a fully-integrated camera module, so the lense, auto-focus, auto-focus motor etc. are all self-contained and none of it is replaceable or serviceable. You’ll see it’s all very small. It’s the same sort of camera you would find in a high-end smart phone.
That said, we have seen users attach the same sort of optics that they would to smartphones to widen field of view, zoom, etc. The auto-focus seems to work appropriately through these adapters. For example a team member has tested the Occipital Wide Vision Lens here to work with both megaAI and DepthAI color cameras. (We have not yet tried on the grayscale cameras.)
Also, see below for using DepthAI FFC with the RPi HQ Camera to enable use of C- and CS-mount lenses.
Can I Use DepthAI with the New RPi HQ Camera?
DepthAI FFC Edition (BW1098FFC model here) also works via an adapter board with the Raspberry Pi HQ camera (IMX477 based), which then does work with a ton of C- and CS-mount lenses (see here). And see here for the adapter board for DepthAI FFC Edition.

This is a particularly interesting application of DepthAI, as it allows the RPi HQ camera to be encoded to h.265 4K video (and 12MP stills) even with a Raspberry Pi 1 or Raspberry Pi Zero - because DepthAI does all the encoding onboard - so the Pi only receives a 3.125 MB/s encoded 4K h.265 stream instead of the otherwise 373 MB/s 4K RAW stream coming off the IMX477 directly (which is too much data for the Pi to handle, and is why the Pi when used with the Pi HQ camera directly, can only do 1080p video and not 4K video recording).
Here are some quick images and videos of it in use:
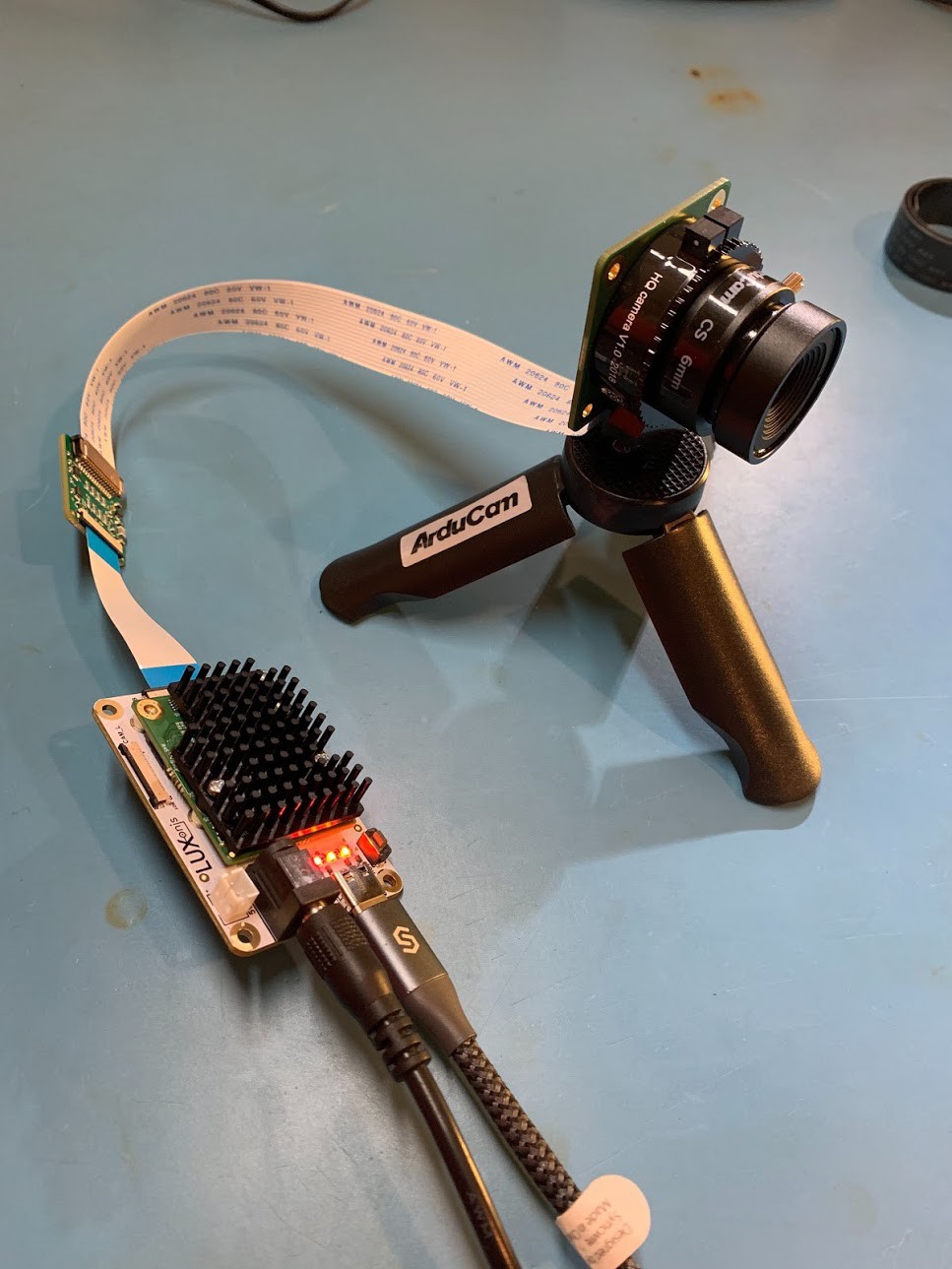
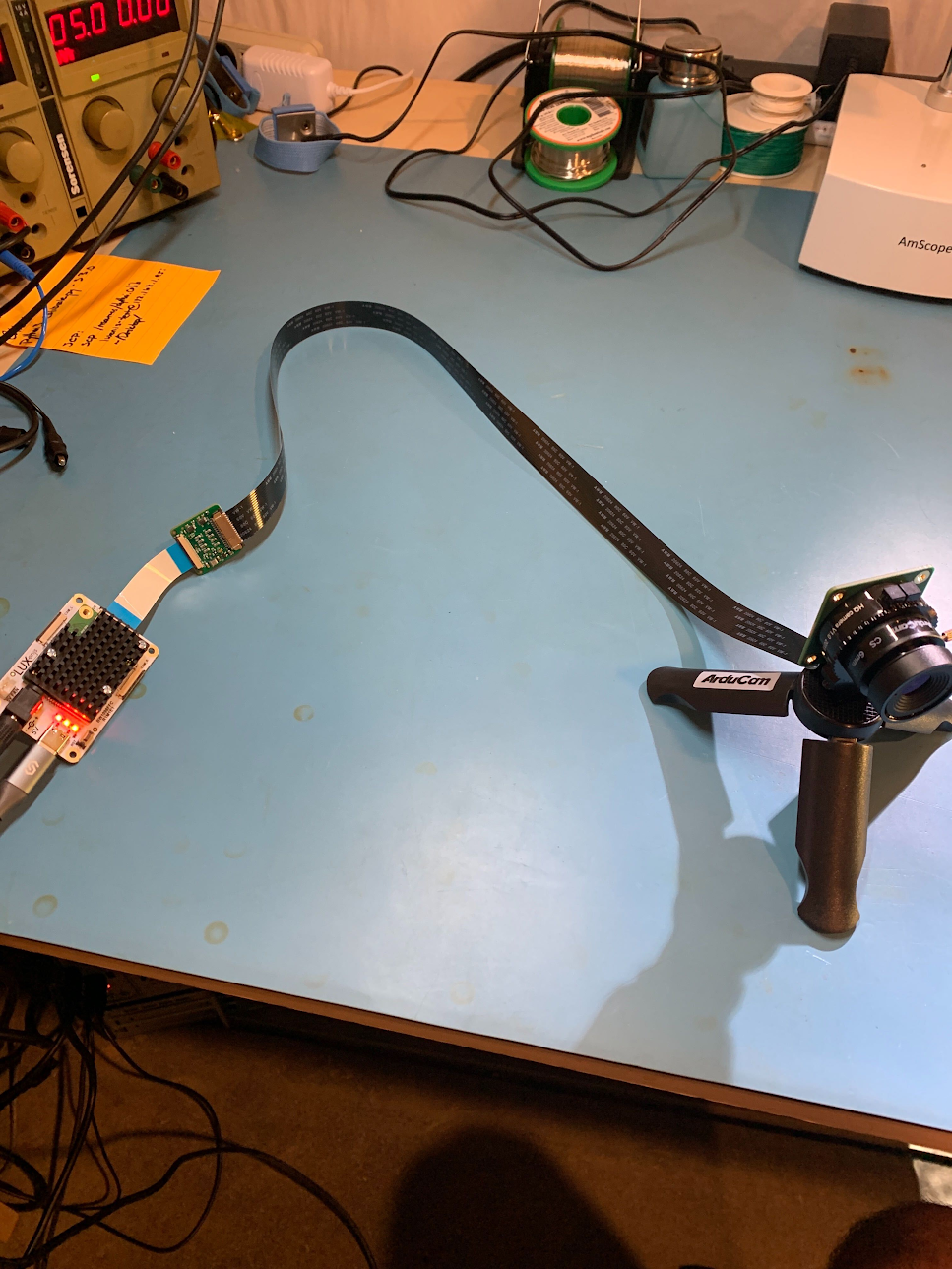

You can buy this adapter kit for the DepthAI FFC Edition (BW1098FFC) here: https://shop.luxonis.com/products/rpi-hq-camera-imx477-adapter-kit
How Much Power Does the DepthAI RPi CME Consume?
The DepthAI Raspberry Pi Compute Module Edition (RPi CME or BW1097 for short) consumes around 2.5W idle and 5.5W to 6W when DepthAI is running full-out.
- Idle: 2.5W (0.5A @ 5V)
- DepthAI Full-Out: 6W (1.2A @ 5V)
Below is a quick video showing this:

Where are the Githubs? Is DepthAI Open Source?
DepthAI is an open-source platform across a variety of stacks, including hardware (electrical and mechanical), software, and machine-learning training using Google Colab.
See below for the pertinent Githubs:
- https://github.com/luxonis/depthai-hardware - DepthAI hardware designs themselves.
- https://github.com/luxonis/depthai - Python Interface and Examples
- https://github.com/luxonis/depthai-api - C++ Core and C++ API
- https://github.com/luxonis/depthai-ml-training - Online AI/ML training leveraging Google Colab (so it’s free)
- https://github.com/luxonis/depthai-experiments - Experiments showing how to use DepthAI.
Where are Product Brochures and/or Datasheets?
Brochures:
- Editions Summary here
- System on Module (BW1099) here
- USB3 Modular Cameras Edition (BW1098FFC) here
- USB3 Onboard Cameras Edition (BW1098OBC) here
- Raspberry Pi Compute Edition Module (BW1097) here
- Raspberry Pi HAT (BW1094) here
- megaAI (BW1093) here
Datasheets:
We have not yet made datasheets for current models (we’ve been too focused on technical implementations tasks), but we have made a datasheet for the coming PoE version of DepthAI/megaAI:
- PoE Modular Cameras Edition (BW2098FFC) here
 Edit on GitHub
Edit on GitHub
support@luxonis.com